Abstract
This manuscript deals with the tuning of event-based controllers. By suitably constraining in a coordinated manner the controller discretisation and the event triggering rule, stability of the closed loop system is ensured, through an analysis that evidences and exploits its switching nature as induced by the event-based controller realisation. Such a sufficient condition, simple to enforce in practice, allows to take standard tuning rules, conceived for continuous-time controllers, and apply them to event-based realisations in a straightforward manner. The manuscript refers to the PI(D) controller structure, but extensions can be envisaged. Both simulation examples and an experimental test are reported.
1. Introduction
Event-based control has been gaining much interest in the last years, as shown by works like [2] and the papers quoted therein. Summarising, one may view event-based control as a means to acquire measurements, take decisions and/or apply actions “only when needed”—opposite to fixed-rate control, where those events are triggered periodically. A thorough use of eventbased control can yield numerous benefits, including reduced traffic in networked systems [23], lower actuator wear, and so forth. In this work we focus on using the event-based paradigm to reduce the number of sensor transmissions, which is very important for example in the presence of battery-operated wireless devices.
10. Conclusions and future work
The problem of tuning event-based industrial controllers was here addressed. Taking an essentially application-oriented attitude, a functional solution was proposed that handles both the controller discretisation and the event triggering rule. By suitably constraining the former, a sufficient stability condition was derived, and thanks to the consequent freedom in selecting the event triggering mechanism, one was devised to exploit the event-based realisation in a view to minimising sensor transmissions. The proposed technique allows to use classical continuous-time tuning rules (for the moment ofthemodel-based type, but extensions will be addressed) in the case of an event-based realisation.
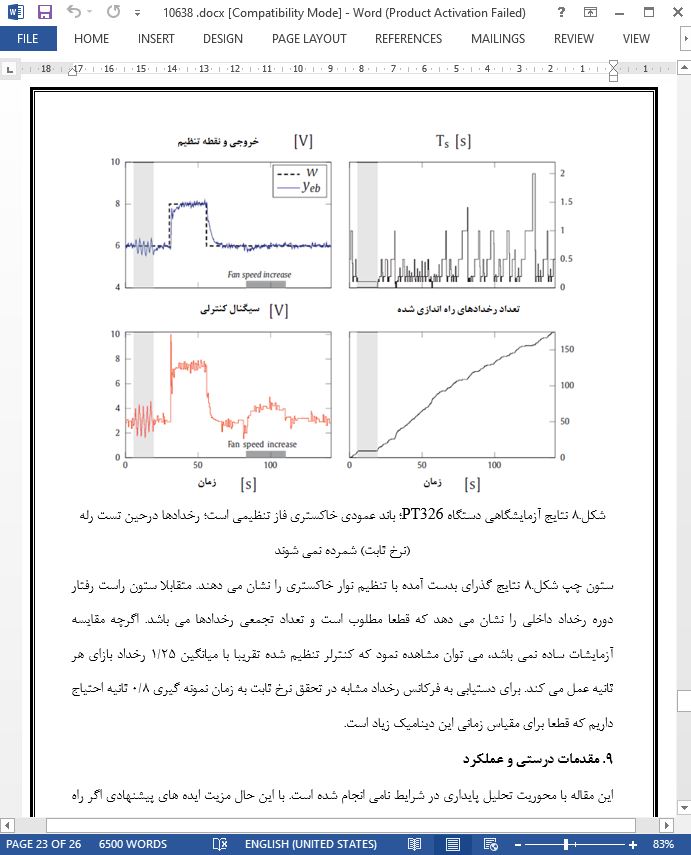
Simulation examples prove the correctness of the idea, that was also tested on a physical equipment with satisfactory results. This matter,together with possible relaxations ofthe stability condition, provides some clues for future methodological research. Also, the establishments oftighter relationships with neighbouring research lines, like for example that concerning the study of possible limit cycles, will be an objective. In addition, further experimenting is envisioned, as is the extension of the idea to other types of eventbased control structures.
Finally, when addressing the matter of this research, we have to notice that one could have taken basically two approaches. The first is the “rule-abstracted” one used herein. The second is to specify a triggering rule and to analyse the impact of the event-based realisation on its result. No doubt the latter could lead to a lower conservatism, but at the same time the former is inherently keen to accommodate for diverse event generation mechanisms, and as proven by the examples, results in any case in an acceptable control performance. Nevertheless, following the alternative route with respect to this work is another interesting subject for future research.