

.svg)
.svg)

.svg)

ترجمه مقاله کنترل کننده منطق فازی نوع پی آی دی برای سیستم یاتاقان مغناطیسی فعال





عنوان فارسی
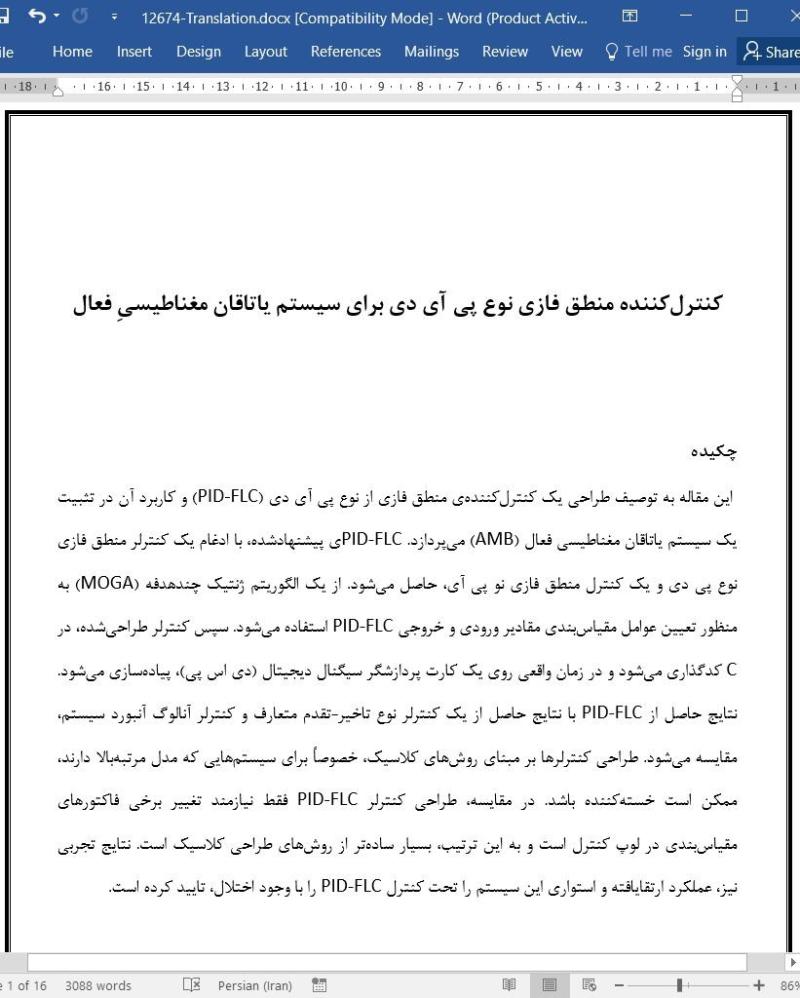
کنترل کننده منطق فازی نوع پی آی دی برای سیستم یاتاقان مغناطیسی فعال
عنوان انگلیسی
PID-type Fuzzy Logic Controller for Active Magnetic Bearing System
صفحات مقاله فارسی
16
صفحات مقاله انگلیسی
6
سال انتشار
2014
رفرنس
دارای رفرنس در داخل متن و انتهای مقاله
سایز ترجمه مقاله
14
فرمت ترجمه مقاله
pdf و ورد تایپ شده با قابلیت ویرایش
فرمت مقاله انگلیسی
pdf و ورد تایپ شده با قابلیت ویرایش
فونت ترجمه مقاله
بی نازنین
نشریه
آی تریپل ای - IEEE
نوع ارائه مقاله
کنفرانس
نوع مقاله
ISI
شناسه ISSN مجله
1553-572X
کد محصول
12674
بیس
نیست ☓
پرسشنامه
ندارد ☓
رفرنس در ترجمه
در انتهای مقاله درج شده است
ضمیمه
ندارد ☓
فرضیه
ندارد ☓
متغیر
ندارد ☓
مدل مفهومی
ندارد ☓
وضعیت ترجمه عناوین تصاویر و جداول
ترجمه شده است ✓
وضعیت ترجمه متون داخل تصاویر و جداول
ترجمه نشده است ☓
وضعیت ترجمه منابع داخل متن
درج نشده است ☓
وضعیت فرمولها و محاسبات در فایل ترجمه
به صورت عکس، درج شده است ✓
doi یا شناسه دیجیتال
https://doi.org/10.1109/IECON.2014.7048506
رشته و گرایش های مرتبط با این مقاله
مهندسی برق - مهندسی الکترونیک - مهندسی کنترل - الکترونیک قدرت
کلمات کلیدی
کنترل منطق فازی نوع پی آی دی - سیستم یاتاقان مغناطیسی فعال - الگوریتم مغناطیسی چندهدفه
کلمات کلیدی انگلیسی
PID-type fuzzy logic control - active magnetic bearing system - multi-objective genetic algorithm
کنفرانس
IEEE - 40th Annual Conference of the IEEE Industrial Electronics Society
۰.۰
(هنوز امتیازی ثبت نشده است)


